自動運転 - 自己位置推定
Autonomous Driving - Self-Localization
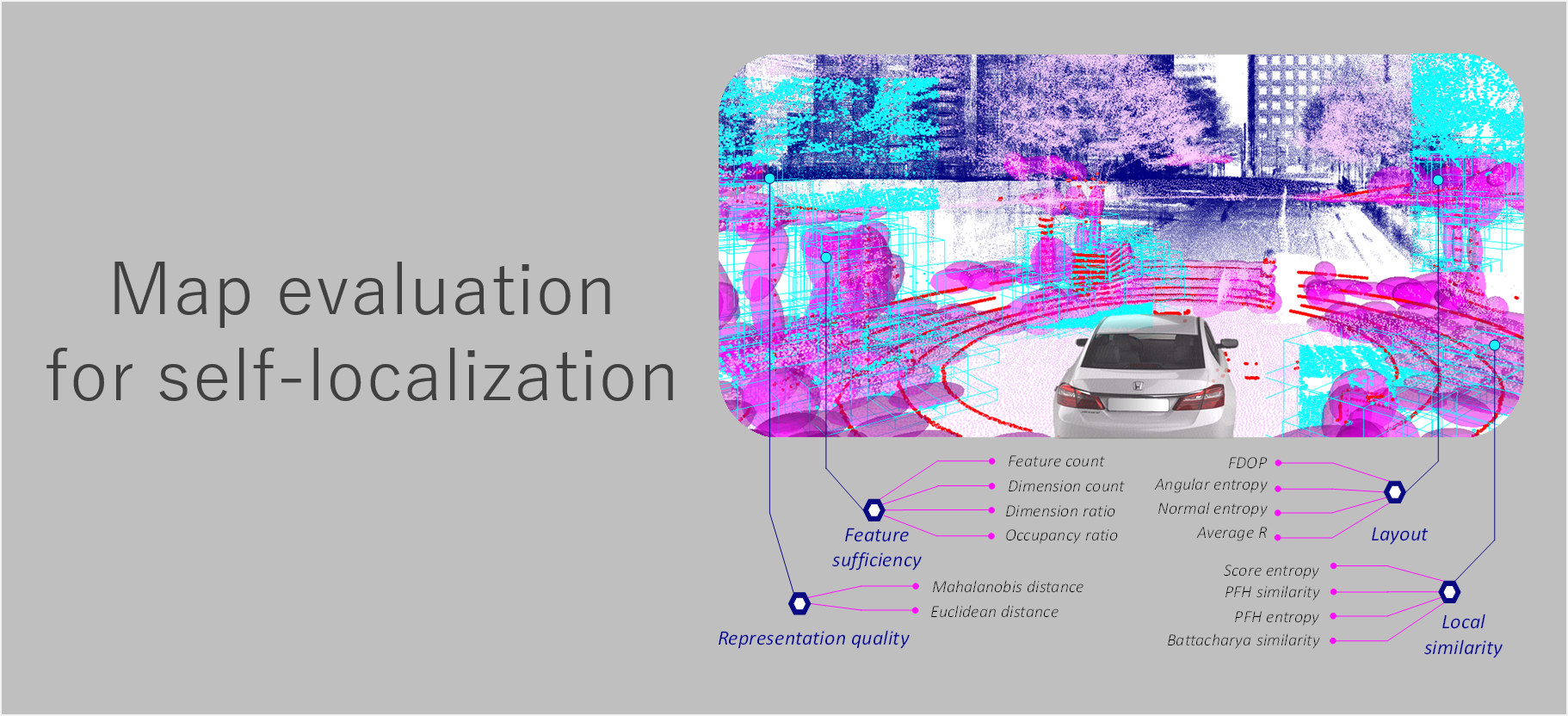
近年、高精度3次元地図の普及やLidar技術の低価格化により、レーザースキャナーデータと高精度3次元地図とのマッチングによる自動運転車の自己位置推定が一般的になっています。 正確な定位を目指し、局所的にもグローバル的にも正確なHD mapを実現するために様々な研究が行われてきました。 しかし、地図のグローバル精度は、地図内での正確な自己位置の定位を保証するものではありません。 正確な自己位置推定を実現するためには、地図がいくつかの要件を満たす必要があります。 そこで、本論文では、地図に焦点を当て、地図を用いた正確な自己位置推定を実現するために必要な条件を検討しました。 地図内で誤差が生じるシナリオを調査しそれらの特徴を比較することで地図に対する自己位置推定の品質を評価するために4つの基準を導入しました。 これらの基準は、feature sufficiency/layout/local similarity/representation quality です。 次に、これらの基準を定量化するために、それぞれの基準に対していくつかの要素を導入しました。 地図フォーマットに関係なく定義される評価の基準とは異なり、正規分布変換スキャンマッチングの地図フォーマットである正規分布地図に基づいて係数を定義します。 これらの要因は、地図上の各位置についてその局所的な近傍の地図特徴を基に算出されます。 新宿で実験を行い自己位置推定の誤差と評価要因を比較することで、様々なシナリオの地図のいくつかの部分でそれらの要因を評価しました。
Recently, autonomous vehicle's self-localization based on the matching of laser scanner data to the high definition (HD) map become more popular due to the availability of HD map and price down of light detection and ranging technologies. Many types of research have been done to achieve locally and globally accurate HD map for accurate localization. However, the global accuracy of the map does not guarantee accurate self-localization within the map. To achieve accurate self-localization, the map should satisfy some requirements. In this paper, the focus is made on the map, as one of the high potential sources of error in localization. By investigating the erroneous scenarios in the map and comparing their characteristics, we introduced four criteria for the self-localization ability of the map. These criteria are feature sufficiency, layout, local similarity, and representation quality of the map. Then, in order to quantify these criteria, we introduce several factors for each criterion. Unlike evaluation criteria which are defined regardless of the map formats, factors are defined based on normal distribution map which is a map format of normal distribution transformation scan-matching. These factors are calculated for each position in the map, based on the map features within its local vicinity. By conducting the experiments in Shinjuku, Japan, we have evaluated these factors in a different part of the map with different scenarios by comparing them with the self-localization error.